


При выборе ультразвукового датчика необходимо учитывать особенности окружающей среды и характер ее влияния на измерения и работоспособность измерительных приборов.
Введение.
Ультразвуковые датчики широко используются в качестве датчиков приближения (proximity), для дистанционного обнаружении различных объектов, измерения расстояний. Как правило, датчики действуют путем посылки короткого цуга ультразвуковых волн в направлении объекта обнаружения, который, отразившись от поверхности объекта, возвращается обратно. Затем, электронная схема производит расчет времени между моментом посылки сигнала и моментом приема отраженного эха. Расстояние является производной величиной от времени и скорости звука в окружающей среде.
В настоящее время на рынке представлен широкий выбор ультразвуковых датчиков в различных конструктивных исполнениях, действующих в различных акустических частотах. Палитра поведения различных акустических частот в схожих условиях окружающей среды не является одинаковой. В большинстве случаев не составит труда, руководствуясь характеристиками, данными производителем, выбрать подходящий датчик для своей задачи. Но в случаях, когда в работе устройств появляются сбои или возникают существенные ошибки в измерениях, необходимо произвести более тщательную оценку факторов влияния, таких как:
- Изменения скорости звука в зависимости от температуры и свойств окружающей среды (в основном, воздуха), — как данные изменения влияют на точность измерений и разрешающую способность датчиков;
- Изменения длины звуковой волны в зависимости от скорости и частоты звука, — как данные изменения влияют на точность измерений, разрешающую способность, минимальный размер объекта, минимальное и максимальное расстояние до объекта;
- Изменения величины затухания в зависимости от частоты звука и влажности, — как данные изменения влияют на максимальное расстояние чувствительности датчиков в воздухе;
- Изменения уровня внешних шумов в зависимости от частоты, — как данные изменения влияют на максимальное расстояние чувствительности и размеры объекта обнаружения;
- Изменения амплитуды отраженного эха в зависимости от расстояния до объекта, размеров и геометрии поверхности, — как данные изменения влияют на расстояние чувствительности.
Ультразвуковые датчики. Особенности применения и выбора.
2. Ультразвук. Основные свойства.
Ультразвук – это звуковые колебания, не воспринимаемые человеческим слухом, частотой свыше 20кГц. Роль микрофонов и громкоговорителей в сфере ультразвука выполняют устройства, называемые трансдукторами. Большинство ультразвуковых датчиков используют один трансдуктор как для передачи, так и для приема сигналов. В датчиках приближения и измерения расстояния, предназначенных для автоматизации технологических процессов в качестве трансдукторов применяются пьезоэлектрические преобразователи (далее — пьезоэлементы) с рабочей частотой от 40 до 400кГц.
3. Скорость звука в воздухе. Зависимость от температуры.
Ультразвуковые датчики действуют по принципу эхолокации – расстояние до объекта рассчитывается на основании измерения промежутка времени между моментами посылки и приема звукового импульса и скорости звука в среде.
Для газов формула скорости звука (c) выглядит так:
c=√( γ k T/ m)= √( γ R T/ M)= √( γ R(t+273,15)/M), (1) где γ — показатель адиабаты: 5/3 для одноатомных газов, 7/5 для двухатомных (и для воздуха), 4/3 для многоатомных; k — постоянная Больцмана; R — универсальная газовая постоянная; T — абсолютная температура в кельвинах; t — температура в градусах Цельсия; m — молекулярная масса; M — молярная масса. По порядку величины скорость звука в газах близка к средней скорости теплового движения молекул и в приближении постоянства показателя адиабаты пропорциональна квадратному корню из абсолютной температуры.
Таблица 1.
| Скорость звука в газах (0° С; 101325 Па), м/с | |
| Азот | 334 |
| Аммиак | 415 |
| Ацетилен | 327 |
| Водород | 1284 |
| Воздух | 331 |
| Гелий | 965 |
| Кислород | 316 |
| Метан | 430 |
| Угарный газ | 338 |
| Углекислый газ | 259 |
| Хлор | 206 |
Формула скорости звука в воздухе при давлении ~1атм:
c(t)=331√(1+t/273), (2)
где t – температура в градусах Цельсия.
Из зависимости видно, что скорость распространения звуковых волн снижается с понижением температуры воздуха. Большинство производителей в спецификации к ультразвуковым датчикам указывают коэффициент температурной погрешности, выраженный в % на один градус температуры. Тогда, с учетом L=ct, (3) расстояние чувствительности может быть откорректировано.
Рисунок 1.

Датчики для высоких, низких температур или для расширенных температурных диапазонов оборудованы автоматической температурной коррекцией.
4. Длина звуковой волны.
Длина звуковой волны определяется из соотношения:
λ=c/f, (4)
где λ – длина волны; c – скорость звука; f – частота.
В случае, когда размер препятствий и неоднородностей в среде заметно превышает длину волны звука, распространение звука происходит по законам геометрической акустики. Если же препятствия сравнимы с длиной волны (или меньше ее), существенную роль начинает играть дифракция волн, с которой связано и рассеяние звука. Данные явления следует учитывать при выборе датчика особенно для обнаружения мелких объектов и неровностей. Например, длина волны при скорости звука 344 м/с (20оС, 1атм) для частоты:
40кГц – 8,6мм.;
180кГц – 1,9мм.;
400кГц – 0,86мм.
Эквивалентна длине волны и разрешающая способность датчиков, указываемая многими производителями в спецификациях на изделия.
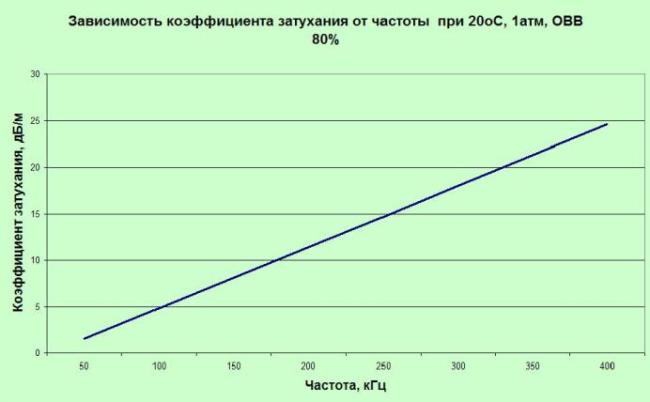
5. Затухание. Зависимость от частоты звука и влажности.
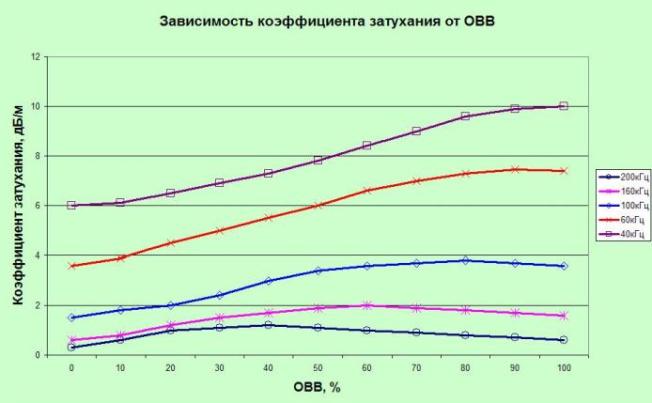
При распространении звука в механической среде, амплитуда звукового давления снижается в результате дифракции волн, рассеяния, поглощения, необратимого превращения энергии в другие формы. Оценка объемов абсорбционных потерь и затухания используется в определении максимальной дальности действия ультразвукового датчика. Коэффициент затухания (дБ/м) увеличивается с ростом частоты ультразвука, в то же время, для любой отдельно взятой частоты существует зависимость коэффициента затухания от влажности (воздуха). Степень влажности, при которой происходит максимальное затухание, различна для разных частот. Например, для частоты свыше 125кГц максимальное затухание происходит при относительной влажности воздуха (ОВВ) 100%, для частоты 40кГц максимальное затухание происходит при ОВВ 50%. Определить максимальный коэффициент затухания для частот от 50 до 400кГц можно, воспользовавшись оценочной формулой:
a(f)=0,066f-1,8, (5)
где a(f) – коэффициент затухания (дБ/м); f – частота ультразвука (кГц) при 20оС, 1атм, ОВВ 80%.
Рисунок 2.
На графике (Рис. 3) приведены экспериментальные кривые для разных частот, показывающие зависимость коэффициента затухания от влажности воздуха.
Рисунок 3.
6. Внешние шумы.
Чем выше частота звука, тем меньше влияние внешних шумов. Это связано с тем, что в окружающей среде присутствует незначительное количество высокочастотных шумов, а низкочастотные шумы быстро рассеиваются в атмосфере.
7. Влияние частоты, расстояния и среды распространения звука на амплитуду звукового давления.
Ультразвуковой датчик посылает звуковой сигнал короткими цугами. Различные датчики производят различное звуковое давление (SPL – sound pressure level). В акустике, в силу широкого динамического диапазона, звуковое давление обычно выражается в децибелах. З. д., являясь совершенно относительной величиной, отвечает соотношению: SPL=20 log (P/P0), (6) где P – фактическое давление в микропаскалях (μПа); P0 – опорное давление, принимается равным 1 μПа – минимальному уровню, воспринимаемому на расстоянии R0=30см. от датчика. Соответственно, R0 принимается как опорное расстояние.
В процессе распространения, звуковой луч радиально расширяется по мере удаления от излучателя, а амплитуда звукового давления P снижается из-за затухания и рассеивания. Тогда SPL на расстоянии R от излучателя выражается формулой:
SPL(R)=SPL(R0)-20 Log (R/ R0)-a(f)R, (7)
где R – фактическое расстояние от датчика; R0 – опорное расстояние; a(f) – коэффициент затухания сигнала с частотой f.
8. Амплитуда отраженного эха от плоской поверхности для различных ультразвуковых частот.
Рассмотренная в предыдущем параграфе формула (7) звукового давления справедлива для прямолинейного распространения звука в среде от одной точки к другой и может применяться для датчиков с разделенным излучателем и приемником (THRU-BEAM). Для датчиков с диффузным отражением луча от объекта (с единственным элементом, исполняющим роль излучателя и приемника), действующим по принципу эхолокации свойственны потери при отражении от среды другой (большей) плотности. Отражение звука — явление, возникающее при падении звуковой волны на границу раздела двух упругих сред и состоящее в образовании волн, распространяющихся от границы раздела в обратном направлении. Количество отраженного звука зависит от соотношения акустического сопротивления сред (Z).
Т.к. акустическое сопротивление воздуха в 1000 раз превышает сопротивление воды, а более твердых материалов — в несколько тысяч раз, ультразвуковые волны на границе раздела отражаются почти полностью. В случае прямолинейного отражения луча от плоской поверхности можно пренебречь взаимодействием звука с твердым телом и воспользоваться формулой Френеля:

V=(Z2-Z1)/(Z2+Z1), (8)
где V – коэффициент отражения; Z2 и Z1 – акустическое сопротивление материалов. Для границы воздух/вода коэффициент отражения V равен 0,99.
Тогда, звуковое давление отраженного эха можно выразить формулой:
SPL(2R)=V(SPL(R0)-20 Log (2R/ R0)-2a(f)R), (9)
где R – расстояние от датчика до объекта; R0 – опорное расстояние; a(f) – коэффициент затухания сигнала с частотой f; V – коэффициент отражения (~1).
Компания ГлавАвтоматика предлагает своим клиентам при автоматизации производственных операций воспользоваться высококачественными компактными ультразвуковыми датчиками производства швейцарской фирмы SNT Sensortechnik AG.




